In light of the recent C++ binding success I had the other night, I decided today I would have a crack at a couple hand detectors written in C++. My goal today was to set in stone a reasonable method I could use to track and map the contours on a hand in real time.
Once I have these contours I would like to begin working on a way to find and mark the middle point of the hand.
The first small problem I ran into was I needed to map out the newly installed C++ OpenCV libraries in CLion (though this step is agnostic between IDEs).
I followed a really helpful example provided by mstfldmr that resulted in a CMakeLists.txt file with the following build instructions:
cmake_minimum_required(VERSION 2.8)
project(OpenCV-test)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
set(CMAKE_PREFIX_PATH "/usr/local/opt/opencv3/share/OpenCV")
set(OpenCV_INCLUDE_DIRS "/usr/local/opt/opencv3/include")
set(OpenCV_LIBS "/usr/local/opt/opencv3/lib")
set(SOURCE_FILES condefects.cpp)
# Find OpenCV, you may need to set OpenCV_DIR variable
# to the absolute path to the directory containing OpenCVConfig.cmake file
# via the command line or GUI
find_package(OpenCV REQUIRED)
# If the package has been found, several variables will
# be set, you can find the full list with descriptions
# in the OpenCVConfig.cmake file.
# Print some message showing some of them
message(STATUS "OpenCV library status:")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " libraries: ${OpenCV_LIBS}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
# Add OpenCV headers location to your include paths
include_directories(${OpenCV_INCLUDE_DIRS})
# Declare the executable target built from your sources
add_executable(OpenCV-test condefects.cpp)
# Link your application with OpenCV librarcies
target_link_libraries(OpenCV-test ${OpenCV_LIBS})
NOTE: condefects.cpp is the C++ source file I’m compiling
Once I’d confirmed that I could indeed compile my C++ code and also reference the copencv2 libraries via the include headings I began the next step.
In order to manually calibrate the HSV values associated with my tracker I used the following code from this video.
The GUI for the calibration can be seen in the following image:
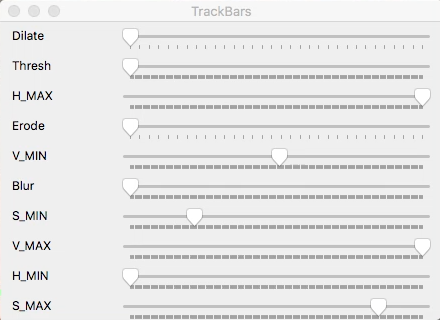
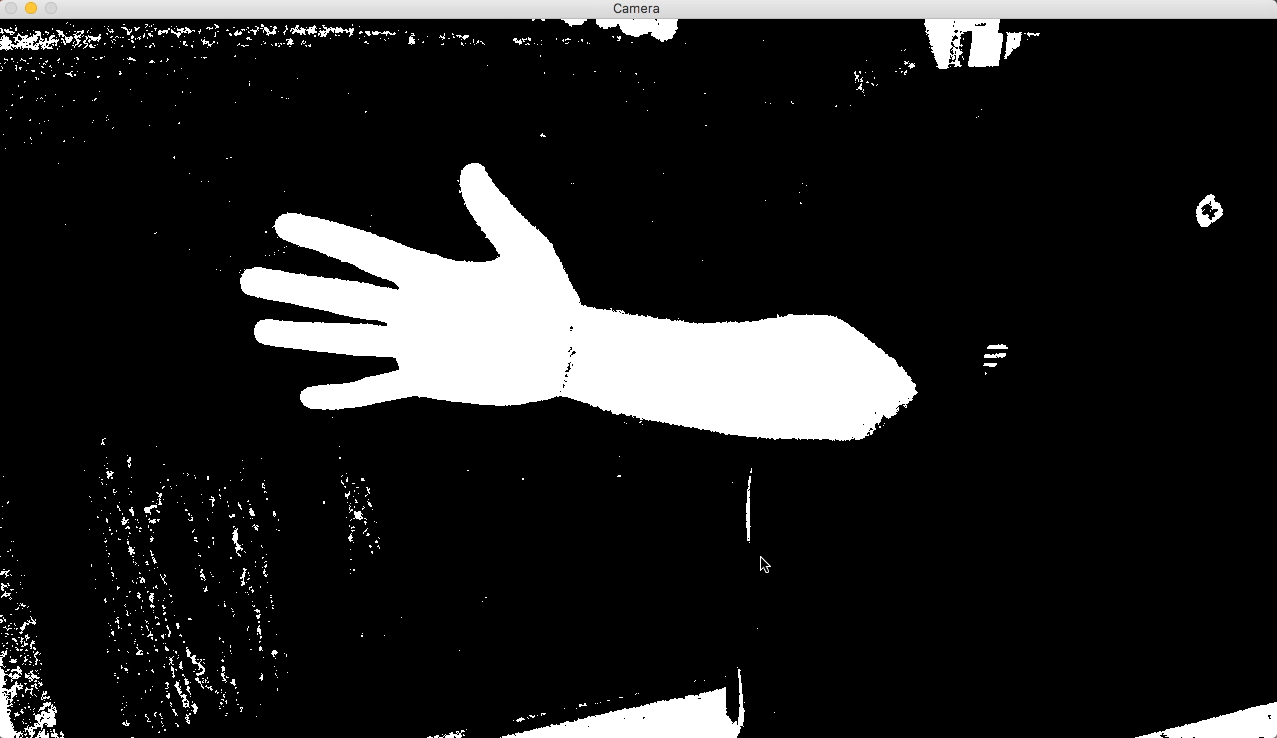
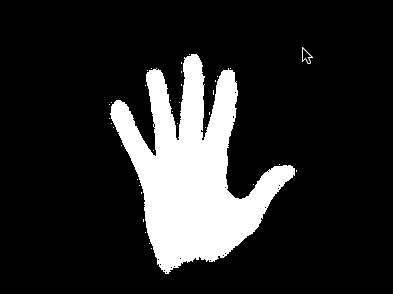
Using this method I was able to manually manipulate the HSV thresholds until the components (hand) that I wanted to capture was the main thing displayed in the image.
Below are the two code blocks used to show the contours and limit the convex defect set.
void showimgcontours(Mat &threshedimg, Mat &original)
{
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
int largest_area = 0;
int largest_contour_index = 0;
findContours(threshedimg, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE);
/// Find the convex hull,contours and defects for each contour
vector<vector<Point> >hull(contours.size());
vector<vector<int> >inthull(contours.size());
vector<vector<Vec4i> >defects(contours.size());
for (int i = 0; i < contours.size(); i++)
{
convexHull(Mat(contours[i]), hull[i], false);
convexHull(Mat(contours[i]), inthull[i], false);
if (inthull[i].size()>3)
convexityDefects(contours[i], inthull[i], defects[i]);
}
//find hulland contour and defects end here
//this will find largest contour
for (int i = 0; i< contours.size(); i++) // iterate through each contour.
{
double a = contourArea(contours[i], false); // Find the area of contour
if (a>largest_area)
{
largest_area = a;
largest_contour_index = i; //Store the index of largest contour
}
}
//search for largest contour has end
if (contours.size() > 0)
{
drawContours(original, contours, largest_contour_index, CV_RGB(0, 255, 0), 2, 8, hierarchy);
//if want to show all contours use below one
//drawContours(original,contours,-1, CV_RGB(0, 255, 0), 2, 8, hierarchy);
if (showhull)
drawContours(original, hull, largest_contour_index, CV_RGB(0, 0, 255), 2, 8, hierarchy);
//if want to show all hull, use below one
//drawContours(original,hull,-1, CV_RGB(0, 255, 0), 2, 8, hierarchy);
if (showcondefects)
condefects(defects[largest_contour_index], contours[largest_contour_index],original);
}
}
void condefects(vector<Vec4i> convexityDefectsSet, vector<Point> mycontour, Mat &original)
{
for (int cDefIt = 0; cDefIt < convexityDefectsSet.size(); cDefIt++) {
int startIdx = convexityDefectsSet[cDefIt].val[0]; Point ptStart(mycontour[startIdx]);
int endIdx = convexityDefectsSet[cDefIt].val[1]; Point ptEnd(mycontour[endIdx]);
int farIdx = convexityDefectsSet[cDefIt].val[2]; Point ptFar(mycontour[farIdx]);
double depth = static_cast<double>(convexityDefectsSet[cDefIt].val[3]) / 256;
//cout << "depth" << depth << endl;
//display start points
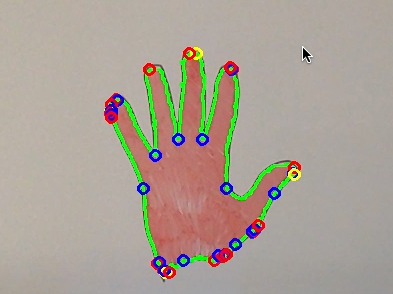
circle(original,ptStart,5,CV_RGB(255,0,0),2,8);
//display all end points
circle(original, ptEnd, 5, CV_RGB(255, 255, 0), 2, 8);
//display all far points
circle(original,ptFar,5,CV_RGB(0,0,255),2,8);
}
}
Using the code above in conjunction with some input key prompts from the user allowed me to view each of the different display methods individually and fine tune my HSV thresholds to minimize defects. Below is an example of the Base hand right through to the display of contour points.
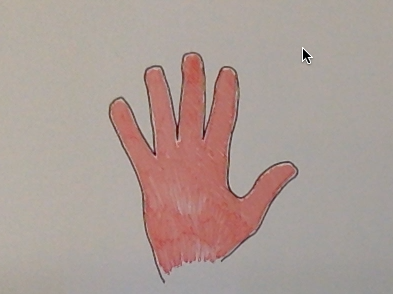
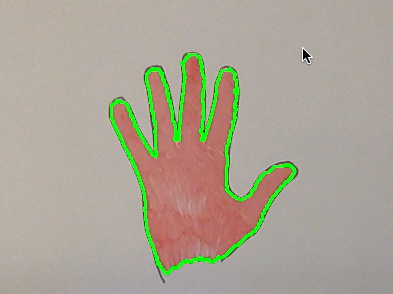
The final step was to add a convex hull around the outside of the hand based on the contour points on the finger tips.
The next step for me to take is to map a point on the hand that I will call the center. From that I can run lines out from the fingers and see if I can add a layer that represents the distance from the wrist to the center of the hand.
How to find convexity defects and draw them - https://www.youtube.com/watch?v=DEHk-5xbJhU
Hand Tracking And Recognition with OpenCV - http://sa-cybernetics.github.io/blog/2013/08/12/hand-tracking-and-recognition-with-opencv/